SRL Communication library
SRL Communication library is a middleware solution for realtime communication based on the DDS Standard. The features include:
High Performance: Designed for low latency, high bandwidth communication. Doesn’t sacrifice performance for ease of use unlike ROS2 (ROS2 uses DDS as middleware).
Cross platorm compatible: Supports windows, mac os, linux and raspbian.
Plug and Play: No need for any network configuration. Everything just works !.
Ease of use: An easy-to-use API and message library similar to ROS1. Can be easilyintegrated into third party software such as game engines and GUI frameworks.
Low footprint: Light package size and minimal set of dependencies.
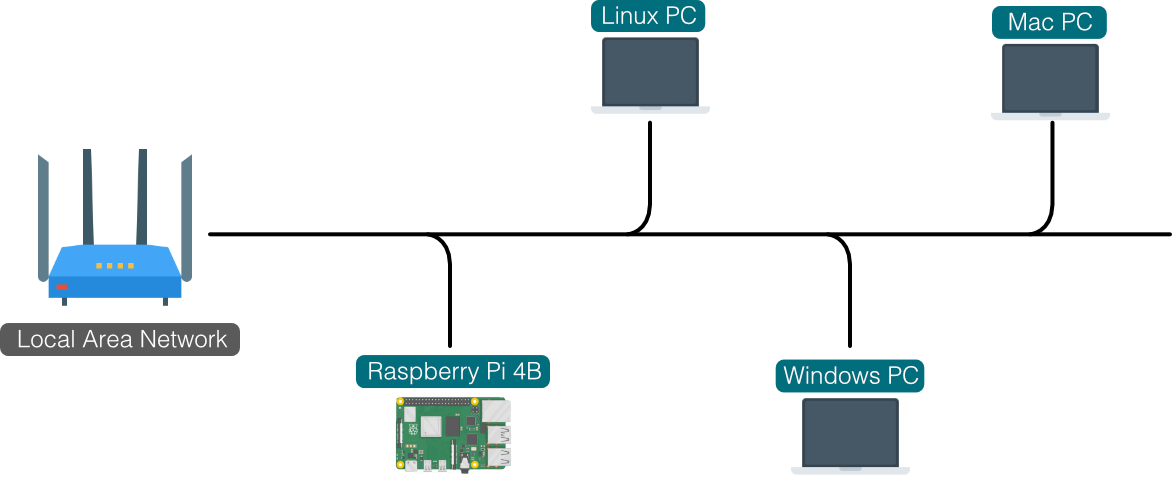
Range of supported devices and transport mechanisms
Supported devices
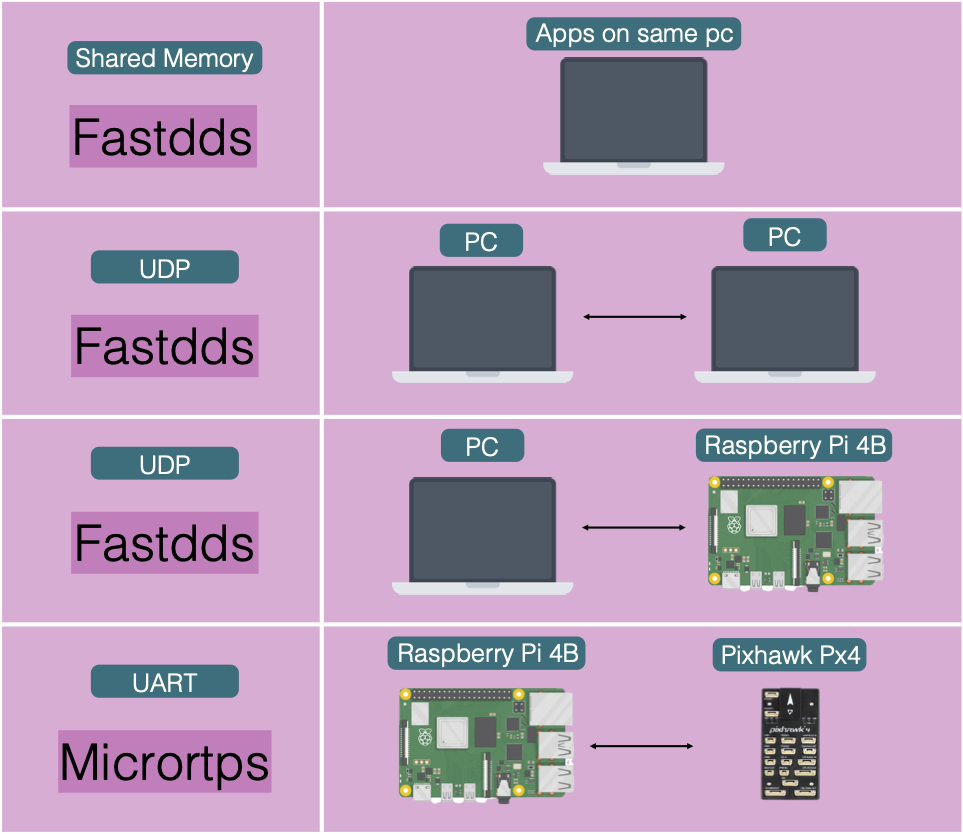
Range of supported devices and transport mechanisms
But what is DDS ?
DDS (Data Distribuion Services) is an open source standard for distributed and real time systems. Smart Grids, Smart Cities, Defense, SCADA, Financial Trading, Air Traffic Control and Management, High Performance Telemetry and Large Scale Supervisory System.
The core concept is the illusion of a Global Data Space (GDS) to which all connected devices have access. In reality, it is fully distributed system of high performance point to point connections. This avoids data bottlenecks and single points of failure. The tgraceful performance degradation in the face of adversities such as sensor/actuator failure, as opposed to abrupt failure. This ensures resilience and predictability under stress that is critical for autonomous systems operating in the real world.
DDS offers dynamic discovery, which means that all devices connected to the local network are automatically discovered. No network configuration is required.
Why not just use ROS1 or ROS2?
Robotics projects typically use the ROS as the software framework. ROS is a set of excellent tools for visuaization, simulation, SLAM etc and middleware for communication between these tools. However, the ROS1 middleware does not satisfy time temporal deadlines and fault tolerances required for real time systems. This is is especially relevant for safety critical systems like flying roots and autonomous vehicles. Also, it is not a suitable choice for embedded onboard computer due to its resource intensive nature. ROS2 addresses these issues by replacing the transport system with DDS, an industry standard for real time communication between computers and embedded devices. ROS2 offers an API similar to ROS1 as it is already popular in the Robotics community. Unfortunately, this lease that messages must undergo conversion 2 time: ROS2 to DDS while sending and DDS to ROS2 while receiving. This conversion and the subsequent internal notification adds considerable latency, sometimes doubling the original delay. Clearly, native DDS implementations are more suitable for time critical communication channels.In addition, there is an increasing need to communicate with software outside the ROS ecosystem, especially for simulation.
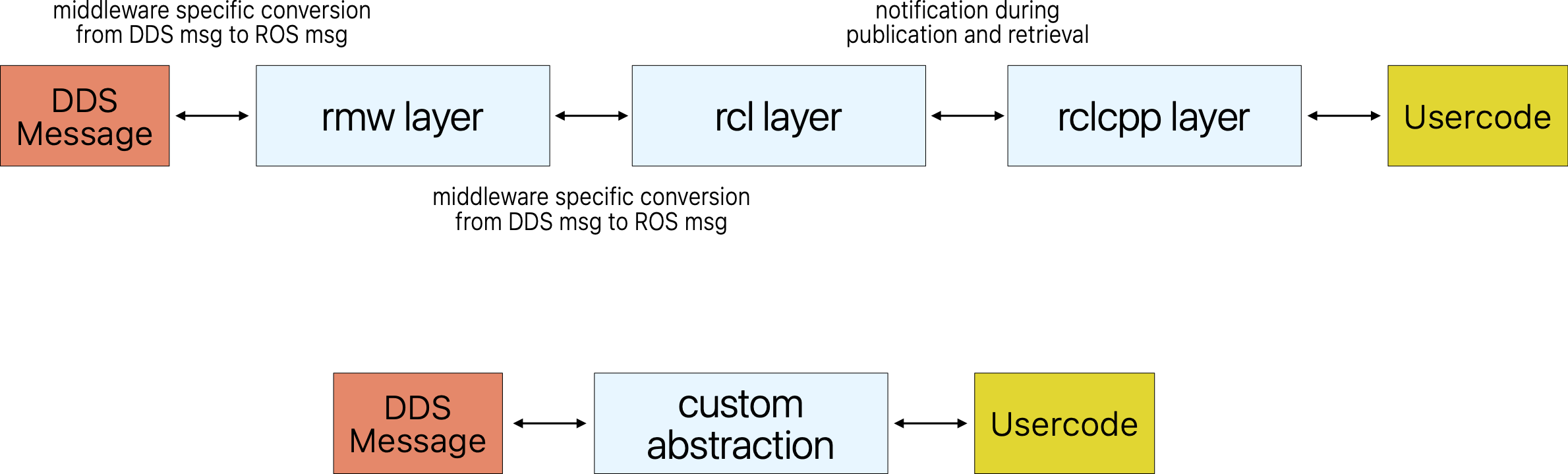
Comparison of dataflow in ROS2 vs native dds implementation
Another issue is hardware and software compatibility. ROS2 supports Windows, Mac OS and linux unlike ROS1. An extension called Micro-ROS provides access to microcontrollers. Nonetheless, installation on certain operating systems incurs overhead upto 20 times larger than the size of ROS2 itself. In contrast, native DDS implementations require minimal supporting software. Also, it is desirable to quickly incorporate new features offered by the latest standards of C++. In particular, more efficient methods are expected for asynchronous and concurrent programming. Such features can drastically improve processing speed and minimise communication latency.