HASEL-Clutch Unit
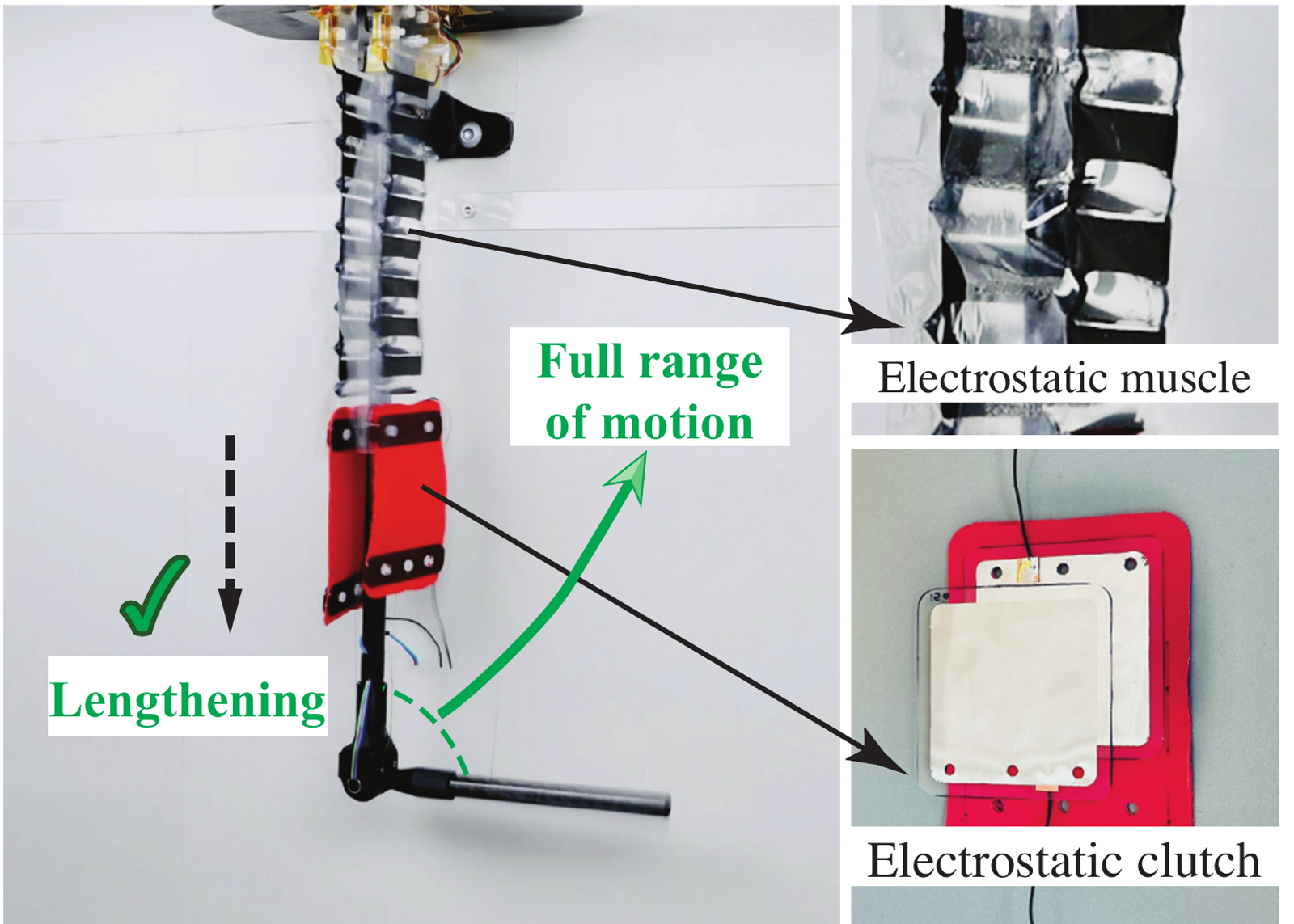
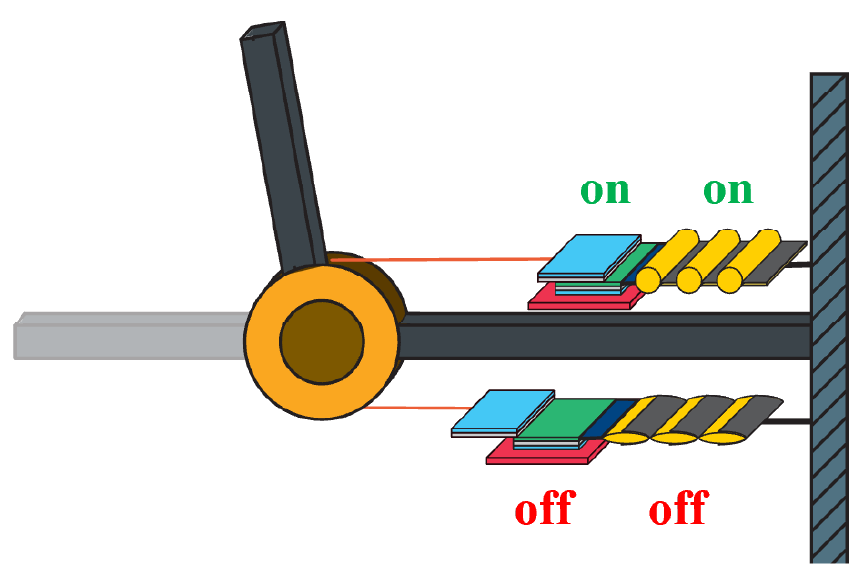
A non-stretchable HASEL actuator provides contraction, while an electrostatic clutch controls when the tendon path is held or allowed to extend.
IEEE International Conference on Robotics and Automation (ICRA) 2025
1 Soft Robotics Lab, D-MAVT, ETH Zurich, Switzerland
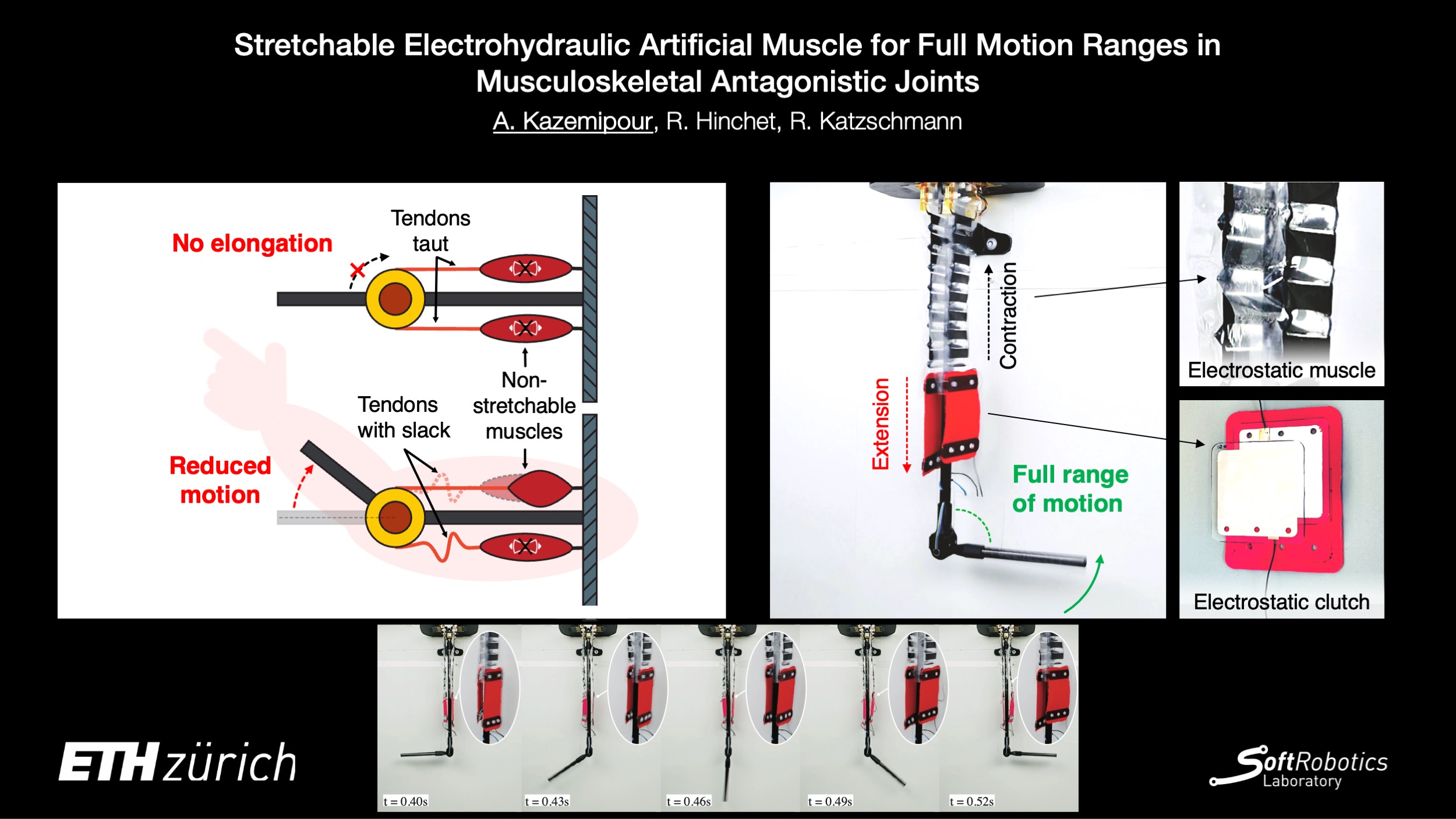
A muscle-clutch architecture that lets non-stretchable electrohydraulic artificial muscles work in antagonistic joints without losing motion range to tendon slack.
Artificial muscles are central to musculoskeletal robots and prosthetic devices, but many practical actuator technologies can only pull or contract. In antagonistic joints, this non-stretchable behavior either blocks motion or requires slack tendons that reduce usable range. This work introduces a stretchable artificial muscle system that combines HASEL electrohydraulic actuators with electrostatic clutches. The clutch units selectively lock, release, and extend the muscle path, allowing coordinated contraction and extension in an antagonistic joint. The resulting system preserves smooth bidirectional motion, supports transitions up to 3.2 Hz, and demonstrates a route for adapting other non-stretchable muscle technologies to full-range musculoskeletal actuation.
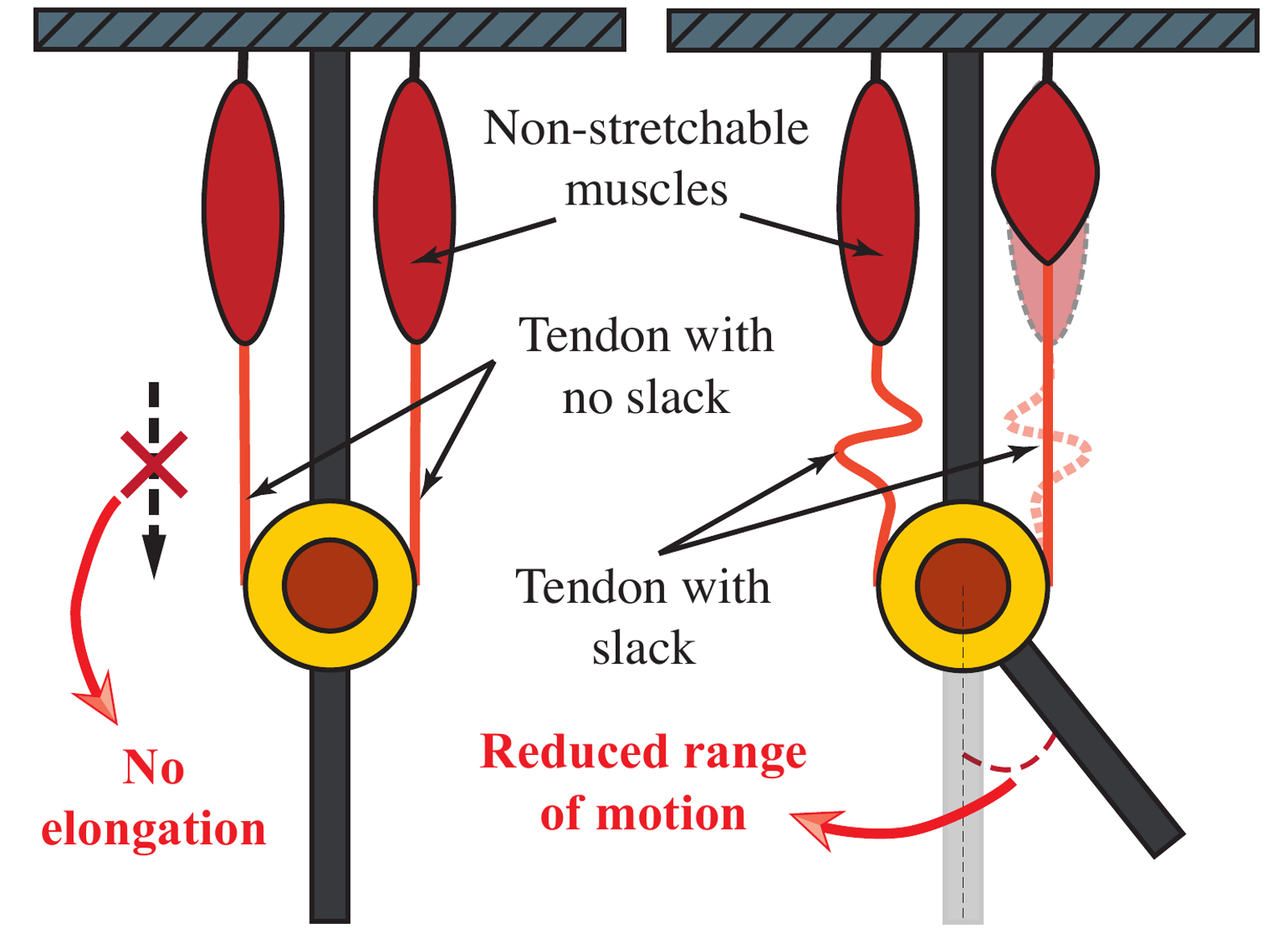
Conventional antagonistic joints need each artificial muscle path to lengthen while the opposite side contracts. Non-stretchable actuators make that difficult: taut tendons resist joint motion, while slack tendons sacrifice range and responsiveness. The proposed HASEL-clutch unit acts as a contractile muscle when engaged and as an extendable element when released.
A non-stretchable HASEL actuator provides contraction, while an electrostatic clutch controls when the tendon path is held or allowed to extend.
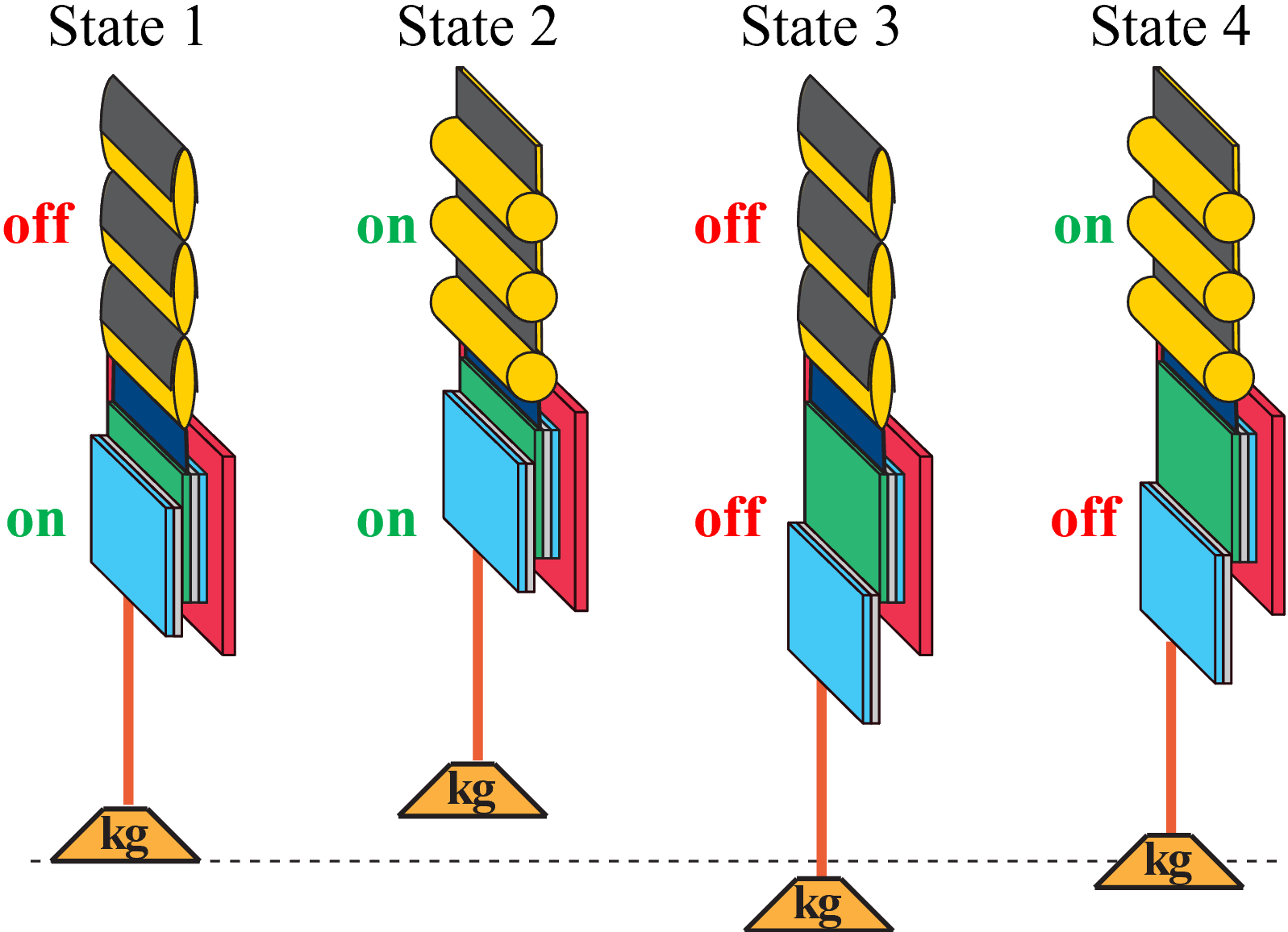
Opposing muscle-clutch units are integrated around a musculoskeletal joint so one side can contract as the other side releases and lengthens.
A discrete control strategy coordinates muscle and clutch voltages to generate smooth motion profiles, directional switching, and braking.
82°
The clutch-muscle joint reached ±82°, compared with ±52° for the HASEL-only slack-tendon configuration.
58%
Adding electrostatic clutches increased joint motion range while using the same HASEL actuation principle.
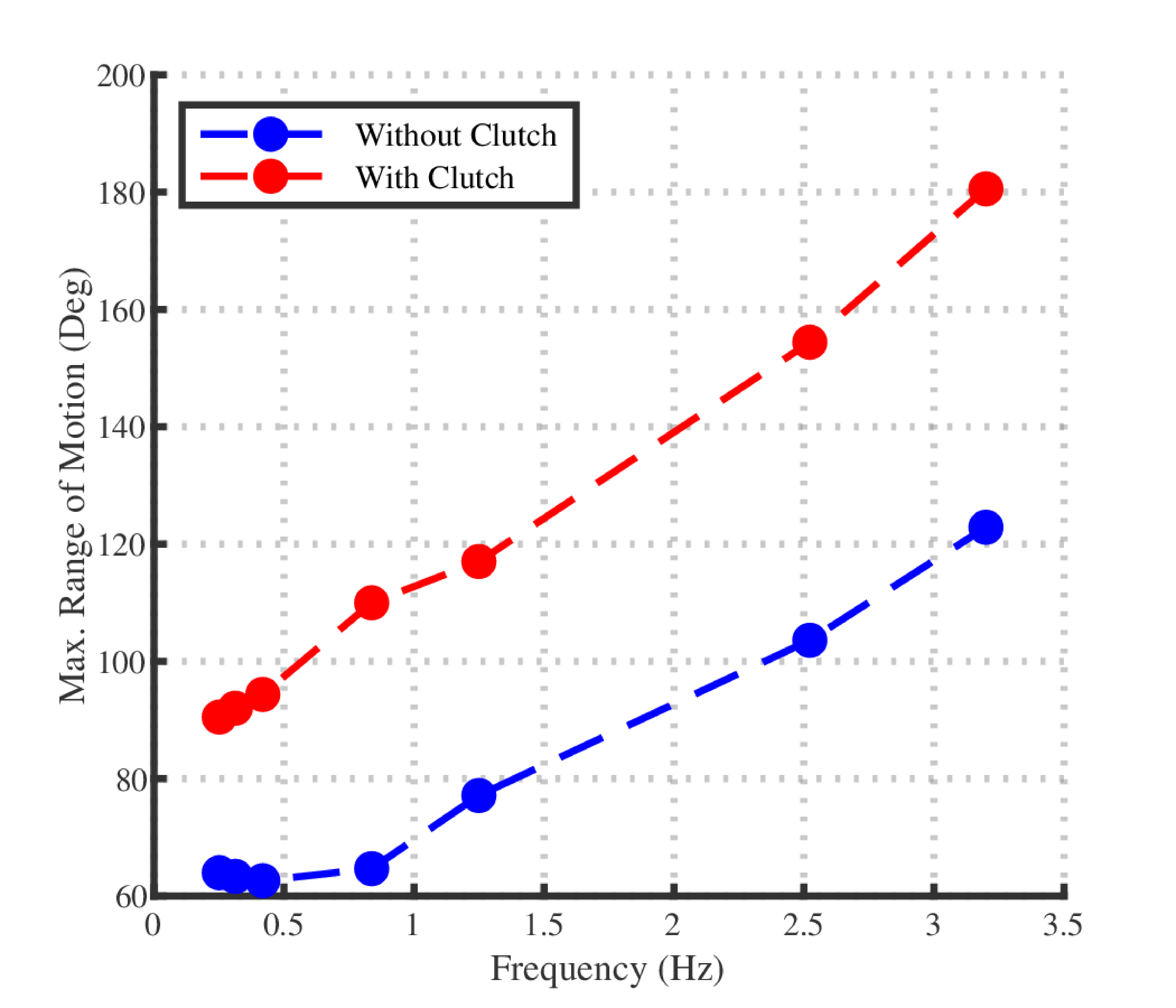
3.2 Hz
Coordinated state transitions enabled seamless alternation between antagonistic muscles at operating frequencies up to 3.2 Hz.
| Configuration | Motion Range | Key Mechanism | Observed Behavior |
|---|---|---|---|
| HASEL-only joint | ±52° | Slack tendons | Motion possible, but displacement is lost to tendon slack. |
| HASEL-clutch joint | ±82° | Release-lock clutch synchronization | Fuller bidirectional motion with controllable extension and contraction. |
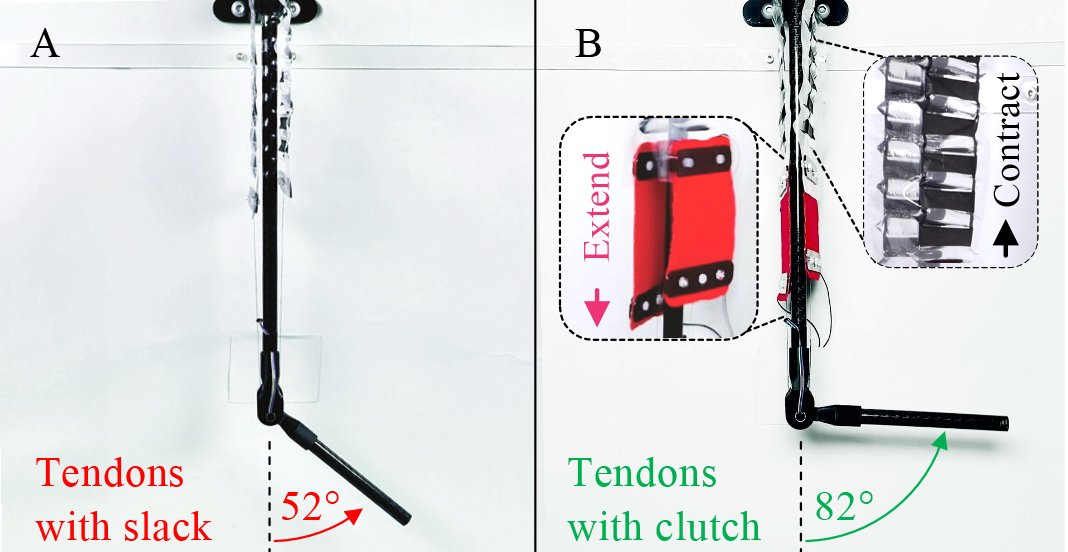
HASEL-only actuation shows the baseline behavior when the antagonistic system relies on slack tendons.
HASEL-clutch actuation demonstrates coordinated contraction and extension at 2.5 Hz.
Joint-angle comparison illustrates the measured motion difference between the two configurations.
Biological motivation highlights the antagonistic muscle behavior that motivates the robotic implementation.
@inproceedings{kazemipour2025stretchable,
author = {Kazemipour, Amirhossein and Hinchet, Ronan and Katzschmann, Robert K.},
title = {Stretchable Electrohydraulic Artificial Muscle for Full Motion Ranges in Musculoskeletal Antagonistic Joints},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025},
doi = {10.1109/ICRA55743.2025.11128116},
url = {https://arxiv.org/abs/2409.11017}
}