Multilayer Actuator
A force-bearing shell and a separate high energy density dielectric layer let electrical and mechanical properties be tuned independently.
HALVE Actuators
Science Advances, 2024
1 Soft Robotics Lab, D-MAVT, ETH Zurich, Switzerland 2 Computational Robotics Lab, D-INFK, ETH Zurich, Switzerland * Equal contribution
Hydraulically amplified low voltage electrostatic actuators reduce the driving voltage of electrohydraulic artificial muscles while preserving muscle-like speed, power, robustness, and untethered robotic utility.
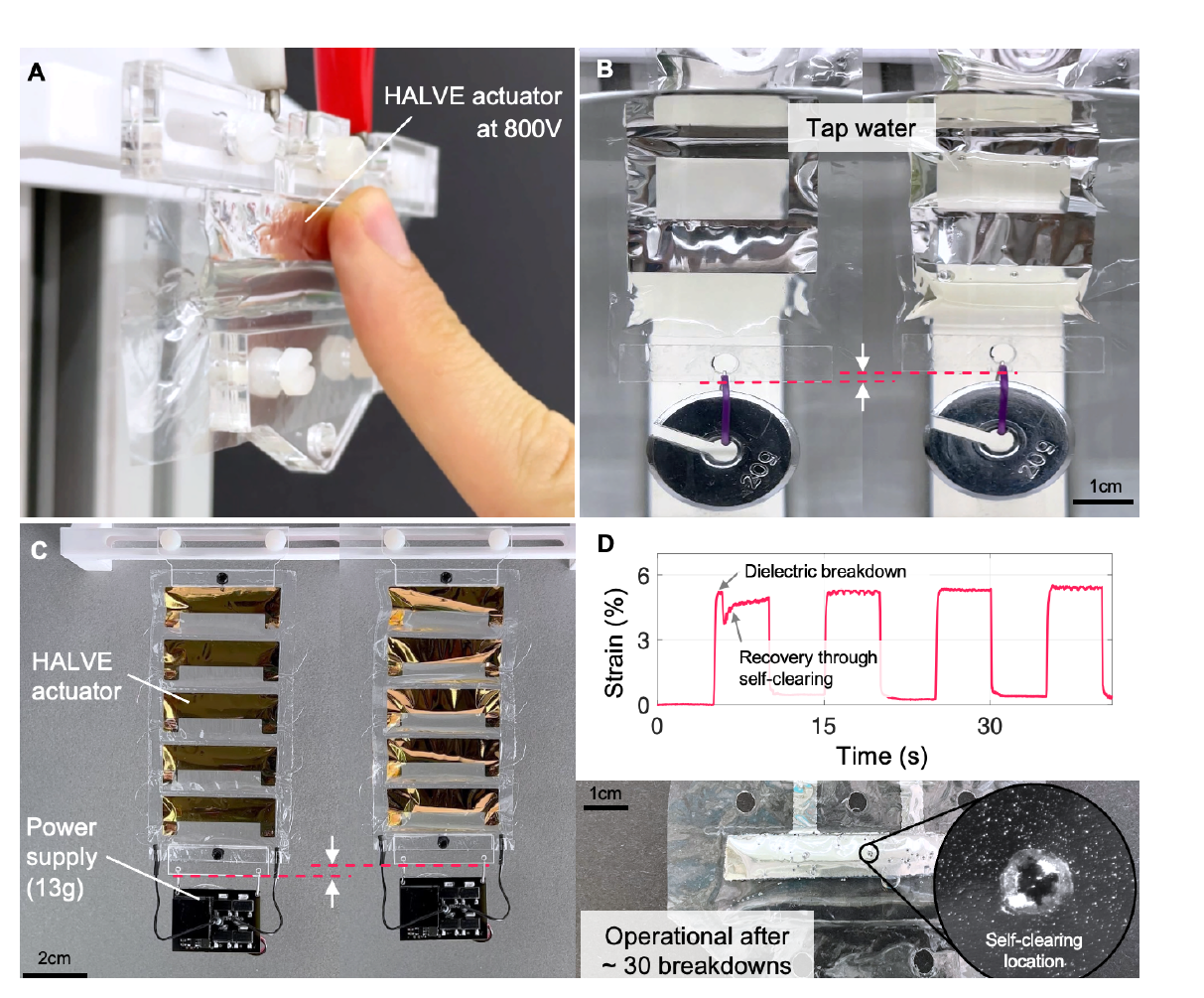
Electrohydraulic artificial muscles can offer high speed and power density, but conventional designs often need several kilovolts and exposed high-voltage electrodes. This work introduces HALVE actuators, a multilayer electrohydraulic actuator design that lowers the operating voltage to around 1100 V while remaining safe to touch, waterproof, and self-clearing after dielectric breakdown. The actuators reach muscle-like average power density and peak strain rate, then demonstrate practical use in an untethered gripper and a soft robotic swimmer.
HALVE actuators combine a structural shell, an electrode, a high energy density dielectric layer, and liquid dielectric amplification. By decoupling mechanical load-bearing from the dielectric layer, the actuator can use thin high-permittivity materials to lower voltage while keeping the electrohydraulic contraction mechanism.
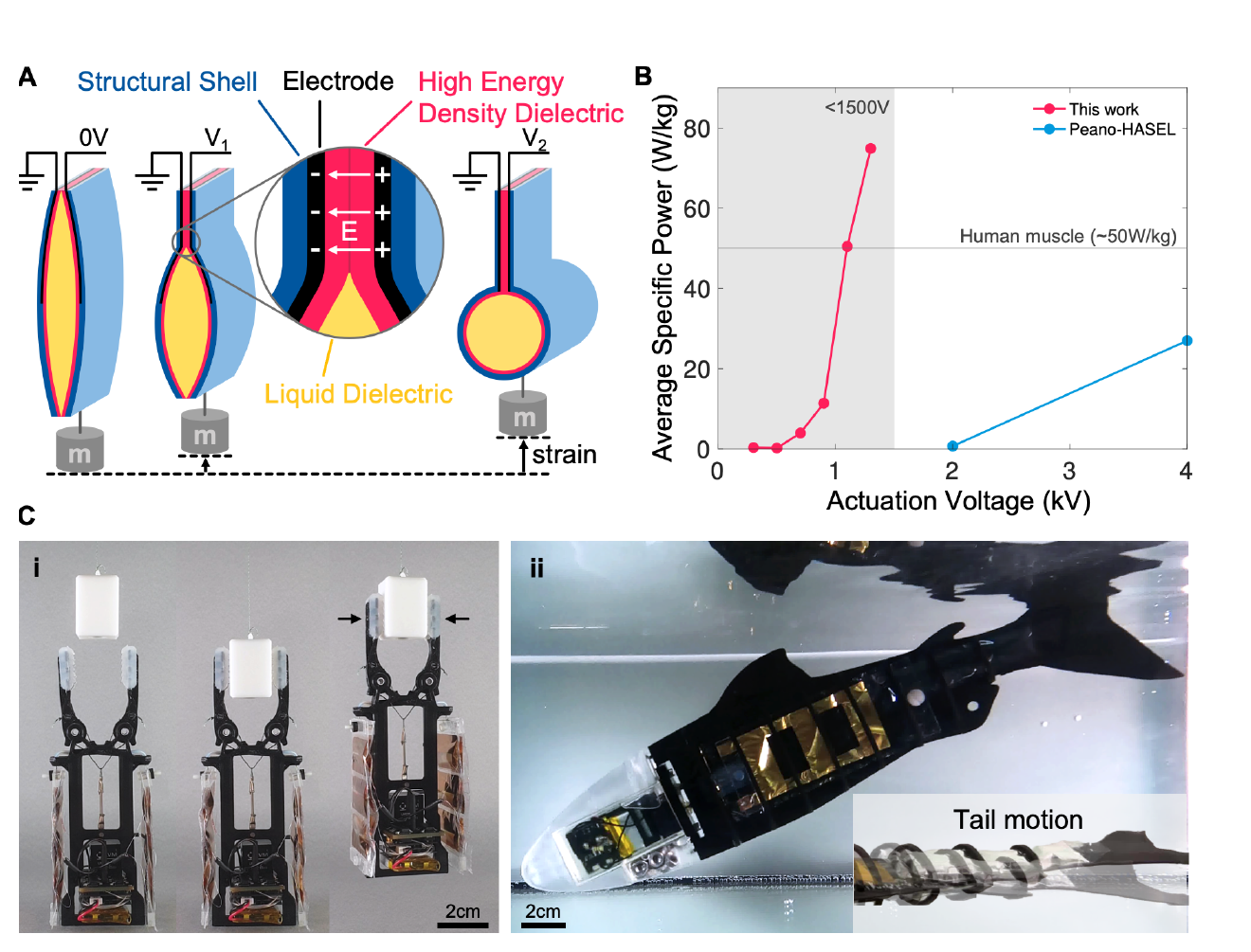
A force-bearing shell and a separate high energy density dielectric layer let electrical and mechanical properties be tuned independently.
Thin PVDF-based dielectric layers increase capacitance, reducing the voltage needed for useful electrohydraulic contraction.
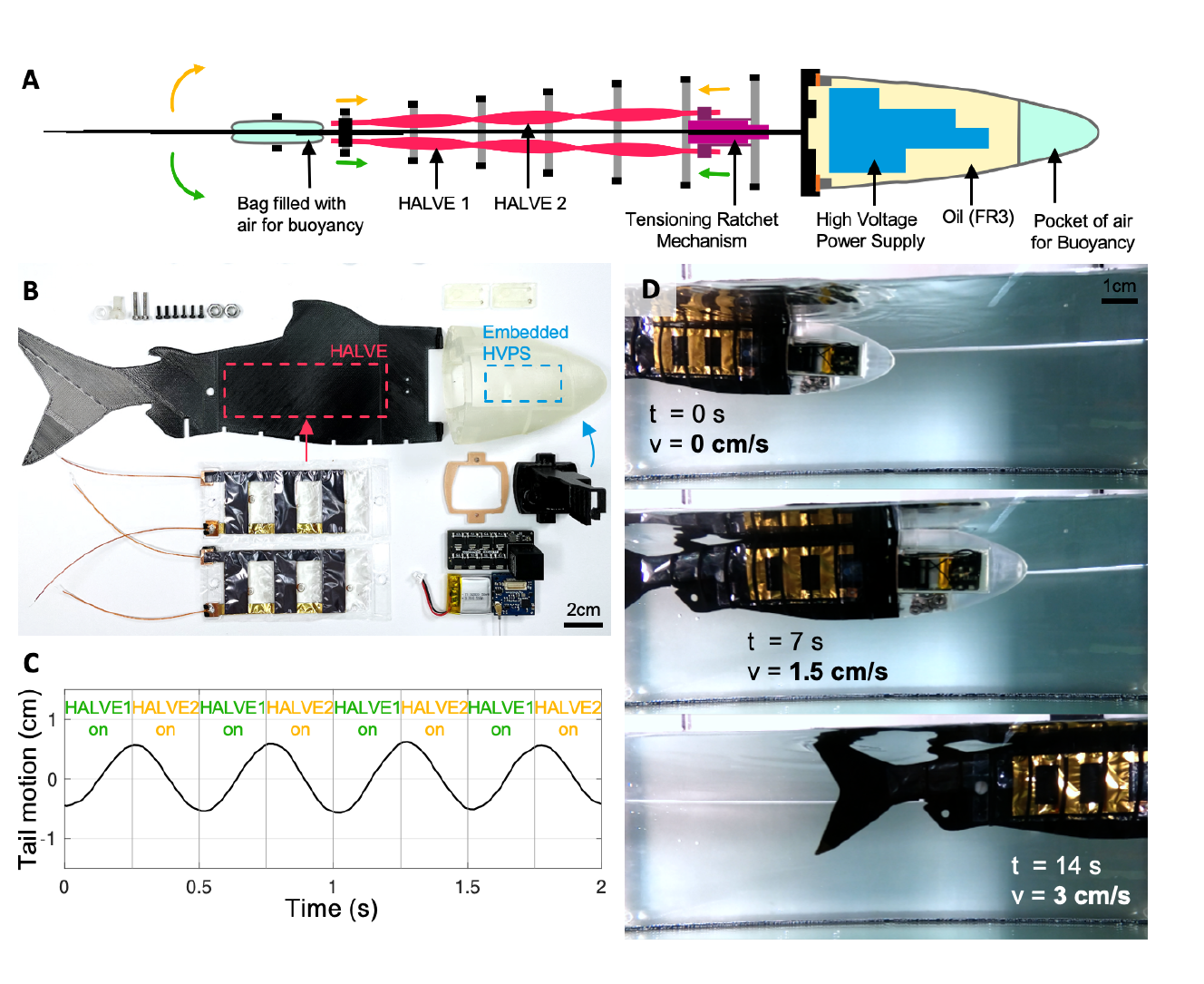
Compact power electronics drive independent muscle packs in untethered systems without bulky off-board supplies.
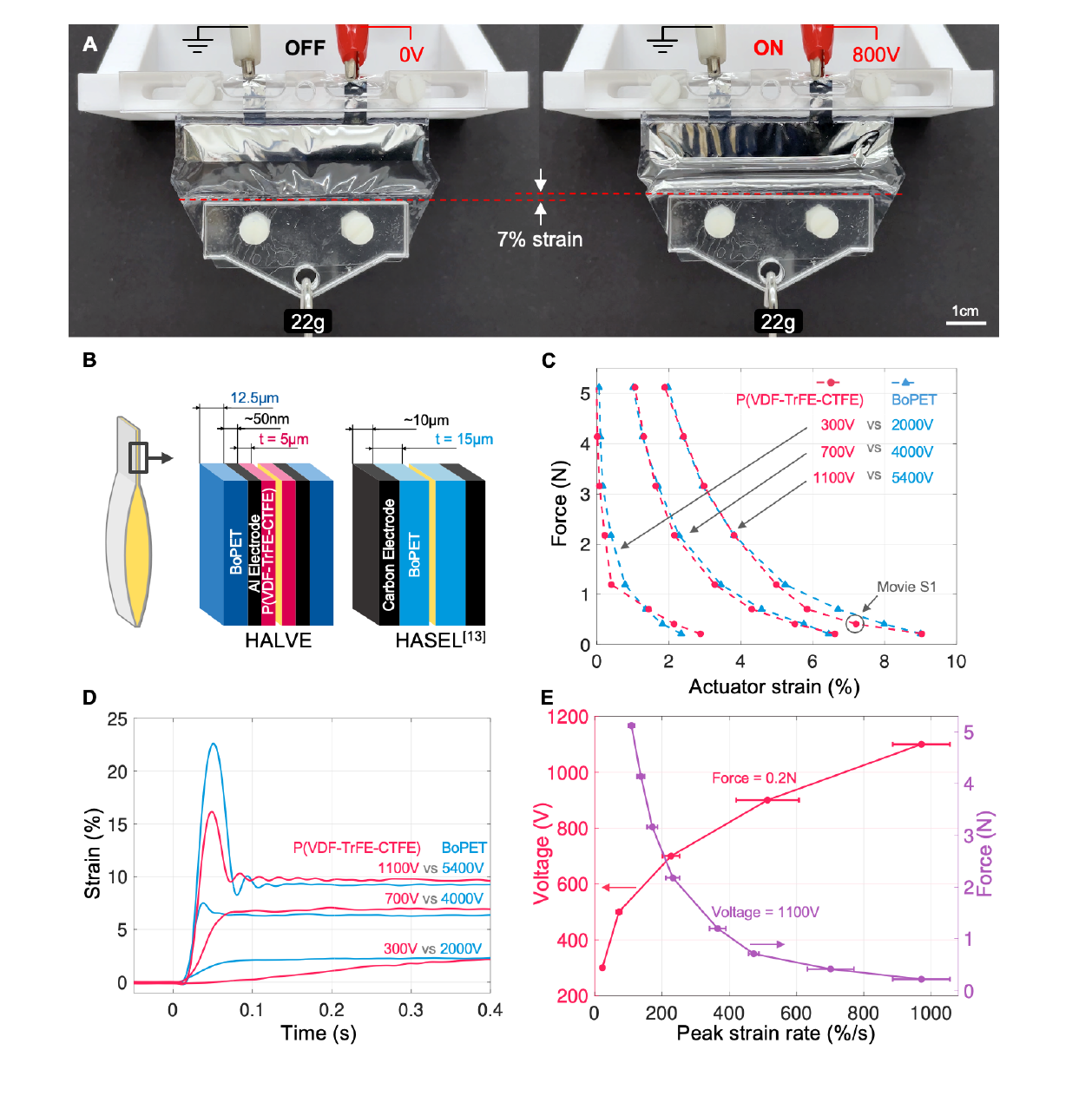
1100 V
Useful contraction at substantially reduced voltages for electrohydraulic actuation.
50.5 W kg-1
Comparable to the typical average power density of mammalian skeletal muscle.
971% s-1
Fast contraction dynamics at low voltage with lightweight electrohydraulic muscles.
3 cm s-1
The untethered swimmer reaches 3 cm s-1 after 14 seconds.
| Challenge | HALVE Contribution | Robotic Impact |
|---|---|---|
| High electrohydraulic actuation voltages | Thin high-permittivity dielectric layer lowers the required drive voltage. | Smaller, lighter, and more practical onboard electronics. |
| Safety and environmental exposure | Insulated, waterproof, and self-clearing actuator construction. | More robust operation near humans, wearables, and water-based robots. |
| Untethered soft robotic demonstrations | Compact muscle packs integrated with power supplies. | Functional gripper and underwater swimmer without external actuation tethers. |
Use the following BibTeX entry when citing this work.
@article{gravert2024lowvoltage,
title = {Low-voltage electrohydraulic actuators for untethered robotics},
author = {Gravert, Stephan-Daniel and Varini, Elia and Kazemipour, Amirhossein and Michelis, Mike Y. and Buchner, Thomas and Hinchet, Ronan and Katzschmann, Robert K.},
journal = {Science Advances},
volume = {10},
number = {1},
pages = {eadi9319},
year = {2024},
doi = {10.1126/sciadv.adi9319}
}