

Styrofoam
100%

Rapid Aerial Pickup and Transport of Objects by Robots
IEEE/RSJ IROS 2022
* Equal contribution 1 Soft Robotics Lab, D-MAVT, ETH Zurich, Switzerland


RAPTOR is a quadcopter platform equipped with a custom soft Fin Ray gripper that enables fast, robust aerial grasping of objects with diverse geometries, reaching objects in hard-to-access places at high speed.
Rapid aerial grasping through robots can lead to many applications that utilize fast and dynamic picking and placing of objects. Rigid grippers traditionally used in aerial manipulators require high precision and specific object geometries for successful grasping. We propose RAPTOR, a quadcopter platform combined with a custom Fin Ray gripper to enable more flexible grasping of objects with different geometries, leveraging the properties of soft materials to increase the contact surface between the gripper and the objects. To reduce the communication latency, we present a new lightweight middleware solution based on Fast DDS (Data Distribution Service) as an alternative to ROS (Robot Operating System). We show that RAPTOR achieves an average of 83% grasping efficacy in a real-world setting for four different object geometries while moving at an average velocity of 1 m/s during grasping. In a high-velocity setting, RAPTOR supports up to four times the payload compared to previous works. Our results highlight the potential of aerial drones in automated warehouses and other manipulation applications where speed, swiftness, and robustness are essential while operating in hard-to-reach places.
Rigid grippers require precise alignment and only handle object geometries they were designed for. RAPTOR instead uses a soft Fin Ray gripper: when a finger touches an object, its compliant structure deflects toward the contact, wrapping around the surface. This passive adaptation dramatically increases the contact area, making grasps tolerant to positioning errors and the disturbances inherent to flight, while the soft material absorbs impact during high-speed approach, protecting both the object and the drone.
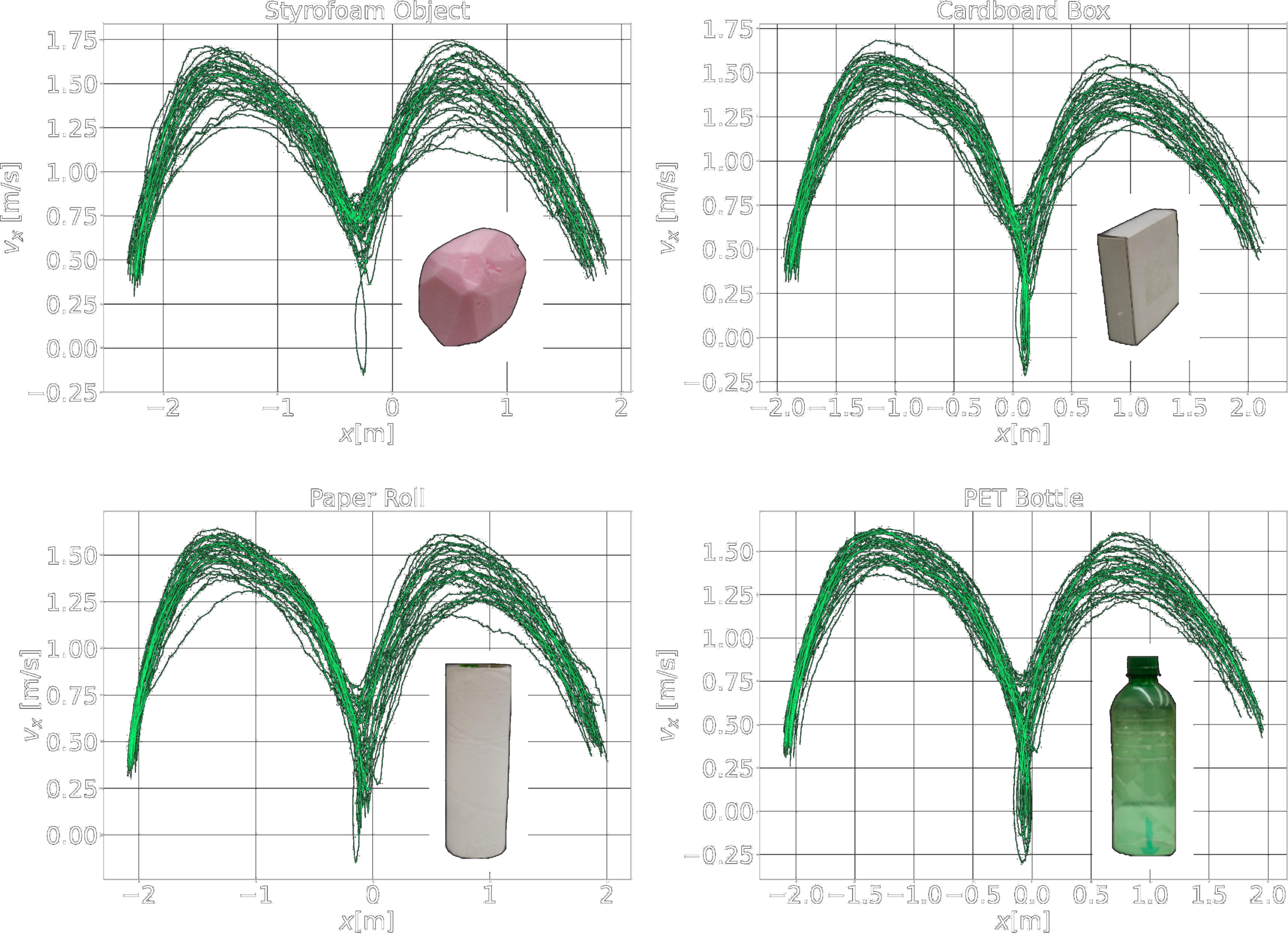
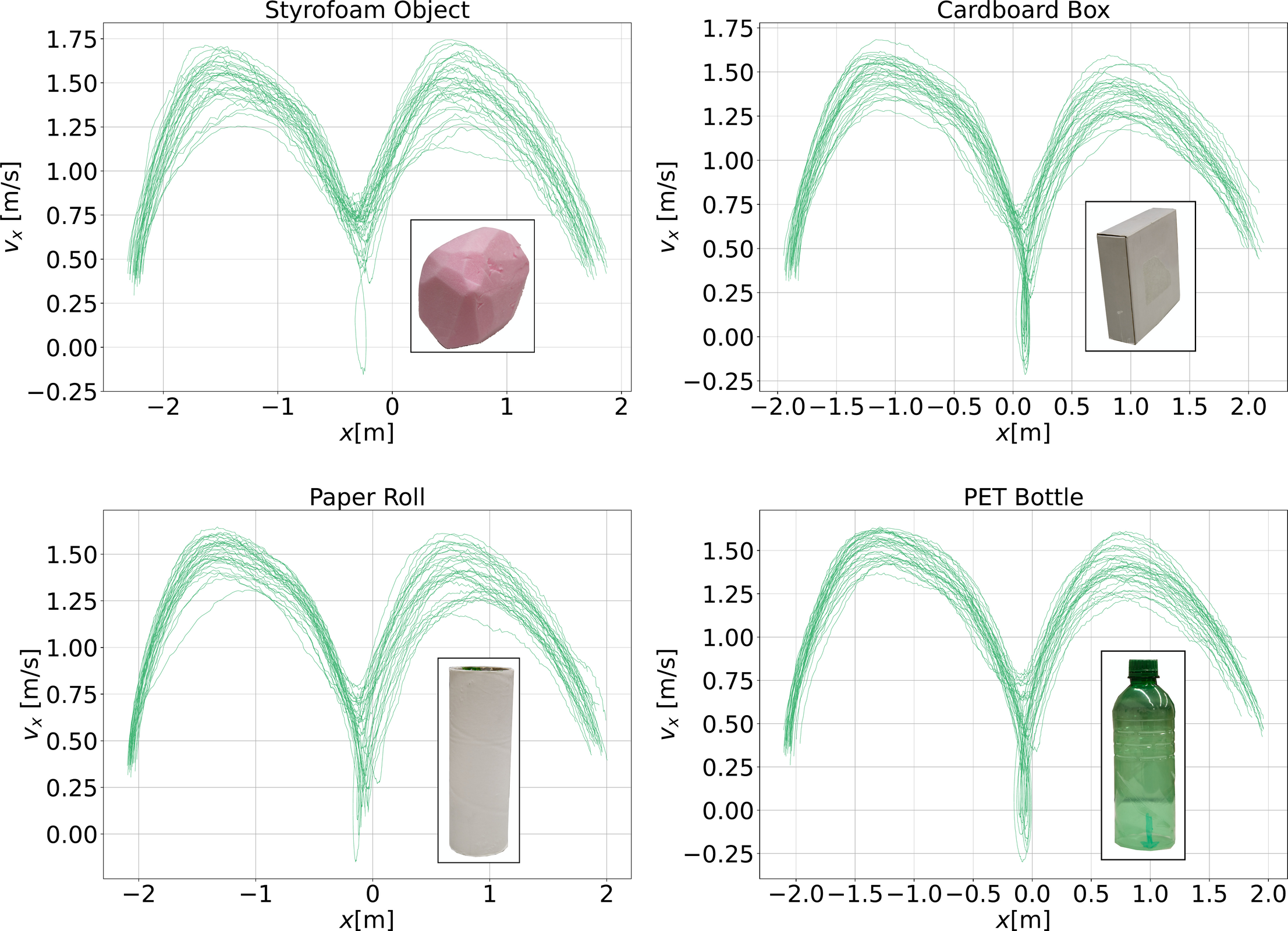
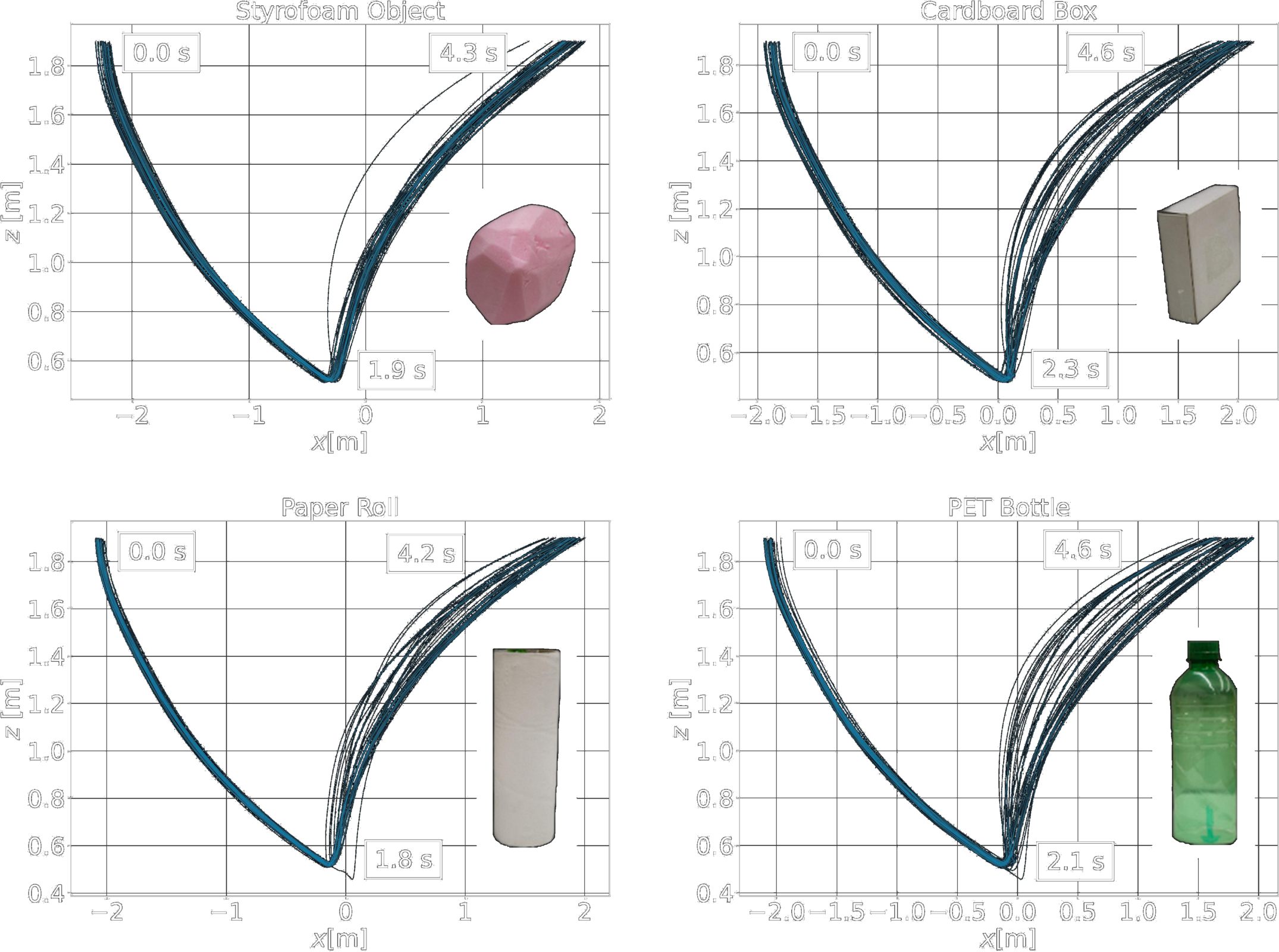
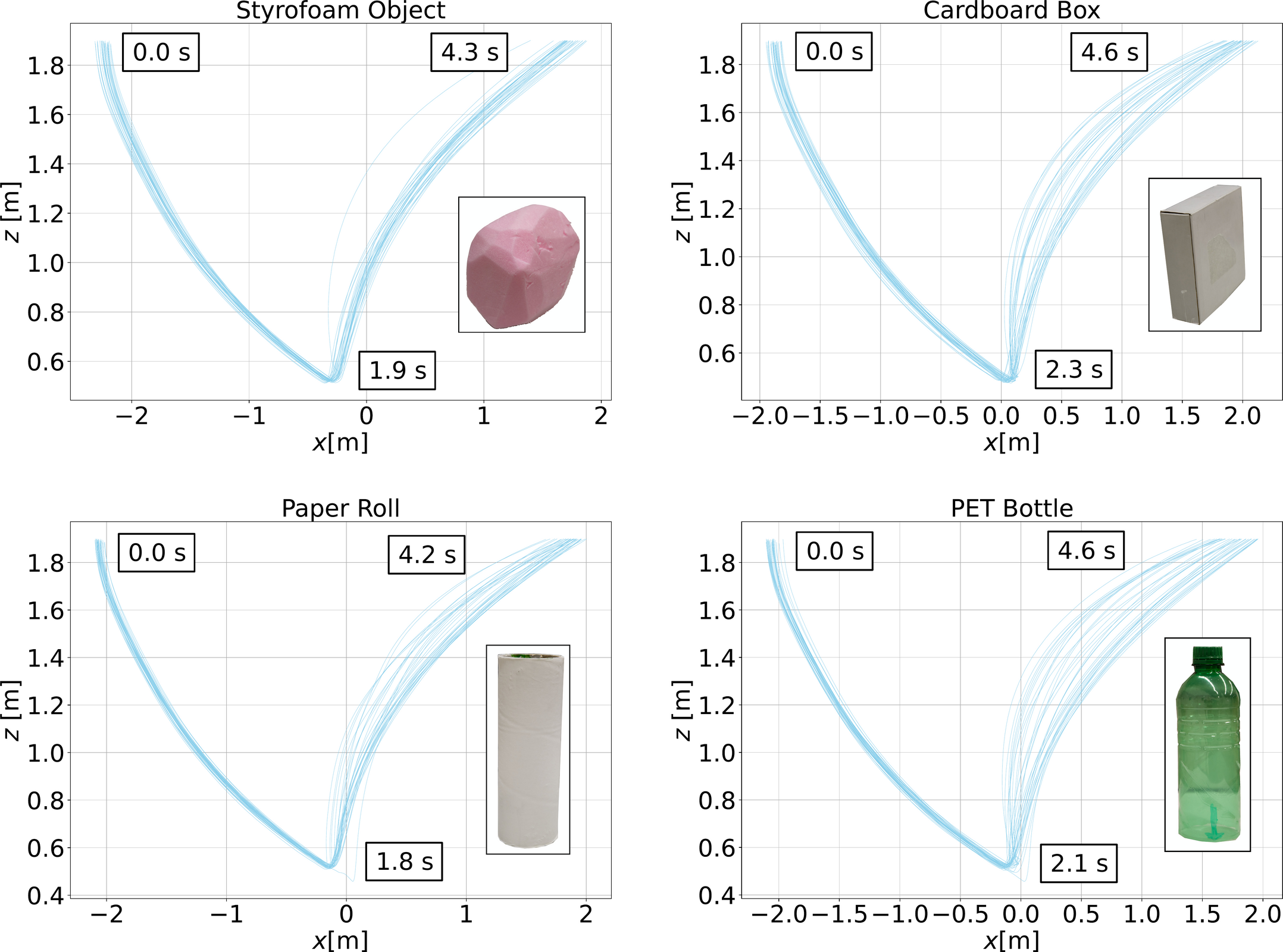
We evaluated RAPTOR on four object geometries across 36 grasps each, flying at roughly 1 m/s during pickup. The soft gripper achieves an average grasping efficacy of 83%, with lightweight, low-friction objects like styrofoam and cardboard reaching near-perfect success rates.
100%


94%


75%


61%
Success rate over 36 grasps per object · mean grasp speed · object weight.
@inproceedings{appius2022raptor,
author = {Appius, Aurel X. and Bauer, Erik and Bl{\"o}chlinger, Marc and Kalra, Aashi and
Oberson, Robin and Raayatsanati, Arman and Strauch, Pascal and Suresh, Sarath and
von Salis, Marco and Katzschmann, Robert K.},
title = {RAPTOR: Rapid Aerial Pickup and Transport of Objects by Robots},
booktitle = {2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2022},
pages = {6862--6869},
doi = {10.1109/IROS47612.2022.9981668}
}