Electrohydraulic artificial muscles
Each muscle is a Peano-HASEL (Hydraulically Amplified Self-healing ELectrostatic) actuator: a
liquid-filled plastic pouch with electrode regions on its surface. When a high voltage is applied,
electrostatic (Maxwell) forces pull the electrodes together, displacing the internal liquid and
causing the pouch to contract—just as a biological muscle shortens. Removing the voltage lets it
relax. These actuators are lightweight, soft, fast, and energy-efficient.
Antagonistic, musculoskeletal layout
Muscles can only pull, not push—so, as in vertebrates, they are arranged in antagonistic pairs
(an "extensor" and a "flexor") across each joint. Activating one side moves the joint in one direction;
activating the other reverses it. Co-activating both pulls the joint stiff, while relaxing both makes it
compliant. This gives the leg tunable joint stiffness, the same trick animals use to stay both
powerful and gentle.
Adaptive, energy-efficient locomotion
The intrinsic compliance lets the leg adapt to uneven ground and absorb impacts passively, hopping over
grass, sand, gravel, pebbles, and rocks under simple open-loop force control. Because electrohydraulic
actuation has no continuous resistive losses like a stalled electric motor, the leg uses a small fraction
of the energy a comparable electromagnetic system would need.
Self-sensing & real-time control
The same actuators that move the leg also sense: capacitive self-sensing reads back joint state and
detects obstacles directly from the muscles' voltage and current, without dedicated external sensors.
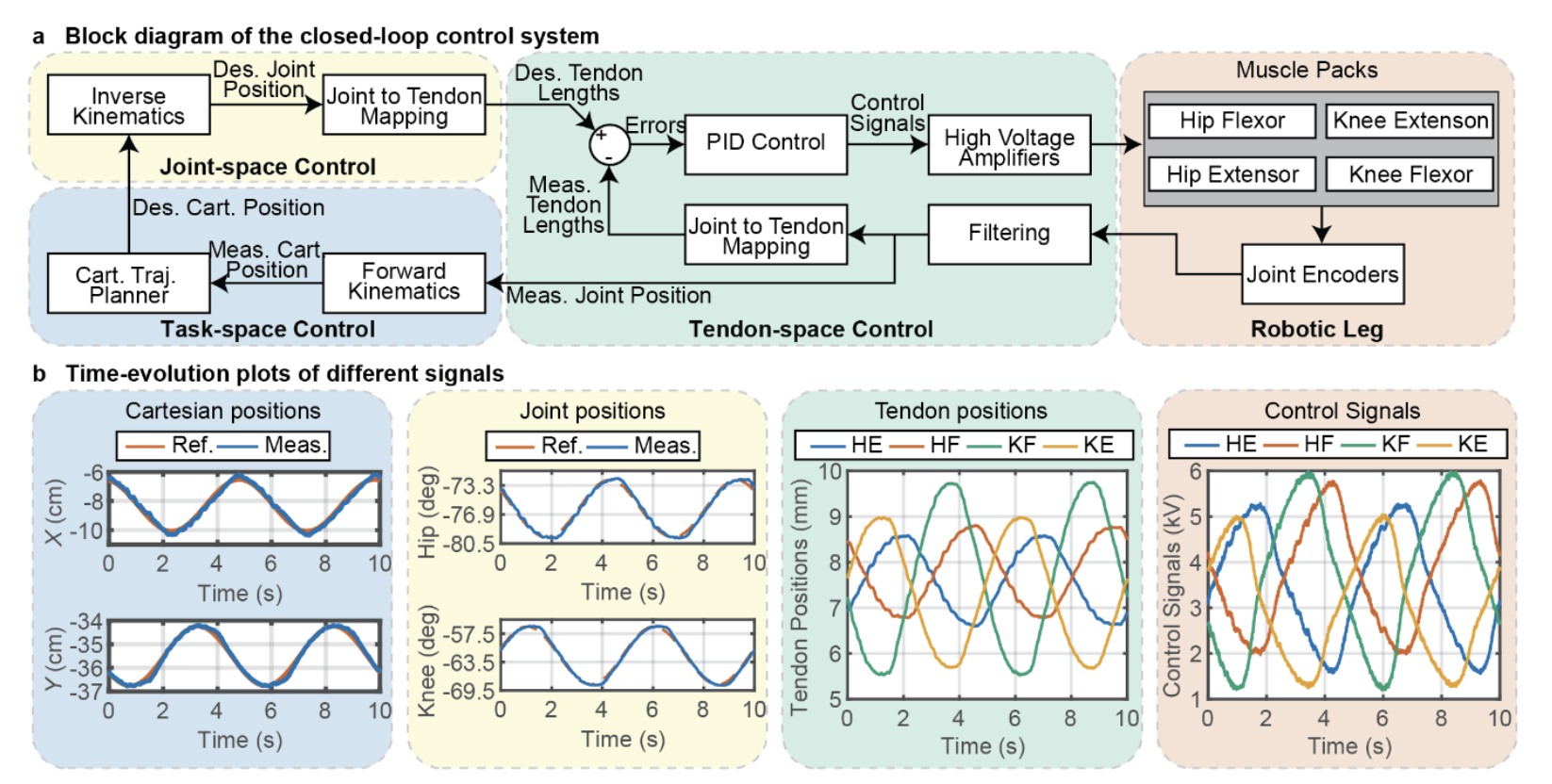
On the control side, a multithreaded C++ pipeline runs a cascaded task-space controller at up to
500 Hz, driving four muscle pairs through high-voltage amplifiers to track leg-tip trajectories
(ellipse, rectangle, infinity, and star paths).